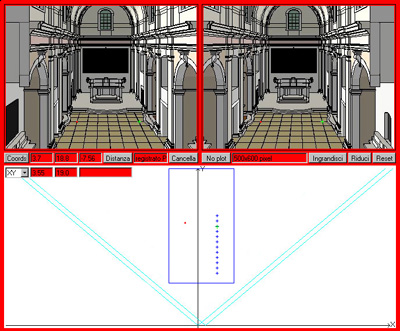
L'applet funziona con una qualsiasi coppia di fotogrammi ripresi nel rispetto del caso normale, di cui siano noti il punto principale e la distanza principale: tuttavia è stata utilizzata, in questo lavoro, a partire da viste prospettiche dell'edificio elaborate con l'ausilio del software Archicad, in modo da consentire una più immediata comprensione dell'edificio nella sua globalità.
Al suo interno, infatti, è al momento presente un palco in legno (utilizzato per spettacoli teatrali), che occulta la vista dell'intera zona presbiteriale: l'efficacia dell'utilizzo di foto stereometriche ne risulterebbe in gran parte vanificata.
In più, l'uso di immagini virtuali consente all'utente la possibilità di effettuare il rilievo sull'edificio a restauro - virtuale - avvenuto, e, nel caso in oggetto, questo è tutt'altro che ininfluente, dato che detto restauro prevede il ripristino della volta a botte, crollata negli anni '60.
LA PRECISIONE OTTENIBILE
La precisione delle coordinate rilevate dipende dai seguenti fattori:
individuazione dei punti corrispondenti sulle coppie stereometriche di fotogrammi.
La precisione è ovviamente tanto maggiore quanto più aumentano le dimensioni dei fotogrammi; il problema è che ciò avviene a scapito della velocità di caricamento degli stessi.
Al fine di ottimizzare il rapporto dimensioni/precisione ottenibile, ho realizzato tre coppie di fotogrammi stereometrici dell'edificio, di dimensioni:
1- 800x600 pixel;
2- 1000x750 pixel;
3- 1200x900 pixel;
Su ciascuno di essi sono state rilevate le coordinate di alcuni punti noti, corrispondenti a una griglia di maglia 1x1 metri posizionata sul pavimento dell'edificio.
I punti presi in considerazione sono quelli della riga più a destra in ciascuna stereocoppia:
1- innanzitutto ho rilevato le coordinate in pixel manualmente, tramite l'applet coords;
Ci si può rendere conto, ingrandendo i fotogrammi, di come lo spessore di ogni punto noto arrivi a coinvolgere più di un pixel e ognuno di questi fornisca un differente risultato.
2- ho effettuato i calcoli necessari a ricavare le coordinate reali dei punti noti tramite una tabella Excel:
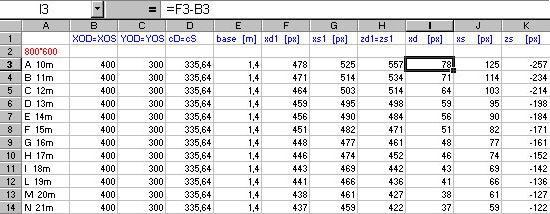
innanzitutto ho inserito i valori dei parametri necessari:
- le coordinate del punto principale (XOD=XOS; YOD=YOS),
- la distanza principale (cD=cS),
- la base,
- le coordinate dei punti noti (xd1; xs1; zd1=zs1),
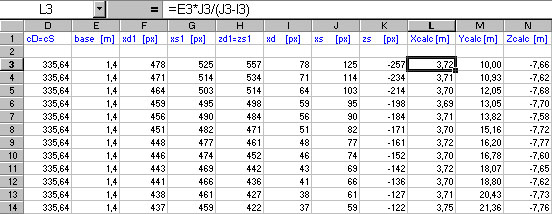
poi queste ultime, espresse nel sistema di riferimento centrato nell'angolo superiore sinistro del fotogramma, vengono trasformate in quelle relative al sistema di riferimento centrato nel punto principale:
otteniamo così xd, xs, zs:
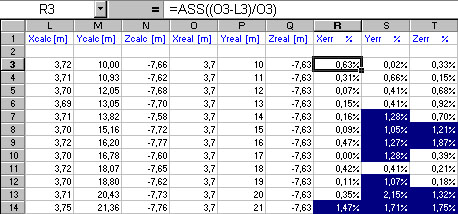
L'ultimo passo consiste nel confrontare i valori di calcolo con quelli reali, e calcolare l'errore percentuale commesso (Xerr, Yerr, Zerr) in ciascuno dei tre casi:
nell'800x600, nel 1000x750, nel 1200x900:
Ho evidenziato, in ciascuno dei tre casi, i valori al di sopra dell'1%, che, come ci aspettavamo, diminuiscono all'aumentare del formato, ma, comunque, non superano il 2.15% per le prime due stereocoppie e l'1.3% per la terza.
3- Sempre tramite il software Excel, ho impostato una serie di grafici per sintetizzare i risultati ottenuti, e in particolare l'errore percentuale in ciascuno dei tre casi:
come abbiamo visto, per le prime due stereocoppie l'errore percentuale max è del 2.15%, per la terza non supera l'1.3%.
4- nel valutare i risultati ottenuti, bisogna tener conto che ad essi ha contribuito anche la risoluzione intrinseca del rilievo.
Nel nostro caso possiamo calcolarla riferendoci all'unico piano parallelo a quello dell'immagine: la parete di fondo.
Dato che essa è l'elemento misurabile più lontano, otterremo perù la risoluzione "minima".
Quest'ultima sarà data dal rapporto tra:
- c = un lato del campo di presa,
calcolabile a partire dalla distanza dalla parete (distante 20.95m dal Punto di Mira: in definitiva d = 8m + 20.95m= 28.95m), e dall'angolo di campo (=100°): c = 2*28.95m*tan50°= 69 metri.
- l = una delle dimensioni del fotogramma = 800 pixel
per cui avremo che 1 pixel-immagine corrisponderà ad un "quadratino" dell'immagine di lato pari a 353 micron (dato che la risoluzione di acquisizione è pari a 72dpi) che a sua volta corrisponde ad un quadrato sull'oggetto reale con il lato pari a 69m/800pixel = 0.0863m = 8.63cm.
Pertanto non sarà possibile nel fotogramma né vedere né tantomeno misurare elementi più piccoli di 8.63cm della parete reale e questa sarà l'incertezza intrinseca che non potrà in alcun modo migliorare.
5- A questo punto non ci resta che calcolare il tempo (approssimativo!) di caricamento delle immagini, e distinguiamo i tre casi:
ciascuna immagine di dimensioni 800x600 pixel, salvata in formato JPG, "pesa" 83 K (=Kilobyte);
per caricarla con un modem a 28,8 Kbps (Kilobit per secondo), occorrono (tenendo conto che 1 byte= 8 bit):
83 K / (28,8 Kbps : 8 bit) = 23 secondi
per caricare entrambi i fotogrammi dovremo attendere perciò circa 23x2 = 46 secondi.
per l'immagine di dimensioni 1000x750 pixel otteniamo:
113 K / (28,8 Kbps : 8 bit) = 31.39 secondi
e, complessivamente, un'attesa di circa 62.78 secondi.
per l'immagine di dimensioni 1200x900 pixel, infine, otteniamo:
148 K / (28,8 Kbps : 8 bit) = 41.11 secondi
e, in definitiva, un'attesa di 82.22 secondi.
OSSERVAZIONE: i fotogrammi finali delle sezioni trasversali sono stati tagliati simmetricamente, eliminando i margini laterali - arrivando, per il formato 800x600, a 500x600 (unica variazione l'ascissa del punto principale: non più 400 ma 250px) - ma il loro "peso", una volta compressi, è rimasto pressochè identico e dunque non se ne è tenuto conto nei calcoli.
6- conclusioni:
come dimostra l'andamento tutt'altro che lineare dei grafici, l'errore commesso nel rilievo dei punti non viene significativamente abbattuto nel passaggio dalle stereocoppie 800x600 a quelle 1200x900, a fronte di un'attesa dell'utente pressochè raddoppiata:
ho optato quindi per il formato 800x600 pixel, tenuto conto anche che, almeno allo stato attuale della tecnologia, facciamo ricorso alla fotogrammetria digitale essenzialmente per sfruttare l'interattività che essa offre.
 PERCHÈ USARLA?
PERCHÈ USARLA?
 LA PRECISIONE OTTENIBILE
LA PRECISIONE OTTENIBILE