La FOTOGRAMMETRIA č la tecnica che consente di rilevare le misure di un oggetto utilizzando le sue immagini fotografiche.
Considerato che la fotografia rappresenta lo sforzo compiuto dall'uomo per memorizzare in modo completo ed oggettivo le informazioni recepite dall'occhio, la fotogrammetria dovrebbe rappresentare la via piů semplice per documentare la realtŕ territoriale.
L'uomo esegue il rilievo fotogrammetrico sin dai primi anni di vita: ogni volta che deve prendere un oggetto, deve prima rilevare la posizione dell'oggetto stesso con il semplice ausilio della vista.
La fotogrammetria sfrutta proprio questa capacitŕ dell'uomo di effettuare rilievi di precisione su tutto ciň che riesce ad afferrare, mettendogli a portata di mano l'immagine fotografica tridimensionale degli oggetti nella scala piů idonea.
Al fine di comprendere il metodo fotogrammetrico, dovremo prendere in considerazione:
Dal punto di vista geometrico una foto di un qualsiasi elemento puň essere assimilata, con sufficiente approssimazione, ad una proiezione centrale dello stesso.
Ricordiamo che una proiezione centrale č ottenuta proiettando i punti dell'oggetto su un piano (= piano o quadro di proiezione) da un punto esterno ad esso (= centro di proiezione o di vista).
Distinguiamo inoltre:
- le rette proiettanti = le rette congiungenti i punti dell'oggetto con il centro di proiezione; (i loro punti di intersezione con il piano di proiezione costituiscono le proiezioni o "immagini" dei punti dell'oggetto)
- la distanza principale = la distanza fra il centro di proiezione ed il piano di proiezione;
- il punto principale = il punto di intersezione con il piano di proiezione, della perpendicolare condotta dal centro di proiezione.
Nel caso della fotografia, il piano di proiezione č assimilabile al piano dell'emulsione fotografica, il centro di proiezione ad un punto dell'obbiettivo della macchina fotografica, le rette proiettanti ai raggi luminosi che hanno formato l'immagine fotografica in questione.
[Quanto agli ultimi due parametri (distanza e punto principale), essi dipendono dalla geometria della macchina fotografica, e meritano di un'analisi più dettagliata.]
Se l'obbiettivo della camera fotografica fosse costituito da una lente infinitamente sottile, il centro di proiezione coinciderebbe con il centro di tale obbiettivo.
In un sistema ottico complesso, qual č nella realtŕ un obbiettivo fotografico, non esiste un unico centro, ma possiamo individuare due punti, posti ad una certa distanza l'uno dall'altro, lungo l'asse ottico del sistema: i cosiddetti punti nodali.
I raggi luminosi provenienti dallo spazio esterno (dovendo attraversare un mezzo di densitŕ
differente dall'aria), vengono deviati, e danno luogo a due fasci di raggi (il primo entrante, l'altro uscente dall'obbiettivo), i cui centri sono proprio i punti nodali.
In pratica: i raggi passano dal primo punto nodale (punto nodale anteriore: N1), ed emergono nello spazio interno alla camera fotografica passando dal secondo punto nodale (punto nodale posteriore: N2), in direzione parallela a quella che avevano nello spazio esterno, raggiungendo infine il piano dell'emulsione fotografica.
Dal punto di vista dell'utilizzazione pratica della fotografia in fotogrammetria, possiamo considerare nulla la distanza fra i due punti nodali e assimilare il punto nodale posteriore al centro di proiezione dell'immagine fotografica: esso individua il punto dello spazio in cui la fotografia č stata scattata (detto anche punto di presa).
2- I PARAMETRI LEGATI ALLA GEOMETRIA DELLA MACCHINA FOTOGRAFICA
L'insieme dei raggi luminosi che, passando attraverso l'obbiettivo, forma l'immagine fotografica, costituisce un fascio di raggi la cui forma dipende dalle caratteristiche geometriche della camera utilizzata.
Per utilizzare una fotografia ai fini fotogrammetrici, cioč per ricavarne misure dell'oggetto fotografato, č indispensabile conoscere perfettamente gli elementi che individuano tali caratteristiche od avere la possibilitŕ di determinarli in modo appropriato.
Essi, detti elementi di orientamento interno della macchina fotografica, sono:
il punto principale:
č il piede della perpendicolare condotta dal secondo punto nodale al piano focale.
la distanza focale:
č la distanza fra il secondo punto nodale dell'obbiettivo ed il piano focale, misurata lungo l'asse ottico dell'obbiettivo stesso.
Per piano focale si intende il piano, perpendicolare all'asse dell'obbiettivo, sul quale l'immagine dell'oggetto si forma nella migliore condizione di focatura.
Come č noto, la distanza focale varia in funzione della distanza dell'oggetto dall'obbiettivo.
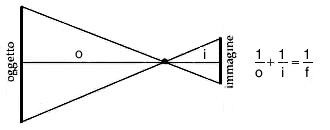
In pratica, riducendo l'obiettivo ad un punto e prendendo come riferimento lo schema, possiamo dire che:
la distanza focale f č funzione di o (=distanza dall'obbiettivo dell'oggetto), e di i (= distanza dall'obbiettivo dell'immagine che si forma sul piano focale), secondo la relazione valida nel caso di lenti sottili.
Da essa si deduce che, se l'oggetto č posto a distanza infinita (o=infinito), allora:
f = i
cioč l'immagine č a fuoco a una distanza pari a f (il piano focale dista f dall'obbiettivo).
In una normale camera fotografica, destinata a fotografare oggetti posti a distanze dal punto di presa molto diverse fra loro, la distanza fra obbiettivo e piano focale, f, č messa a punto dal costruttore per fotografare all'infinito e rimane rigidamente fissa.
L'obbiettivo puň avvicinarsi od allontanarsi dal piano focale per realizzare le migliori condizioni di focatura in funzione delle differenti distanze.
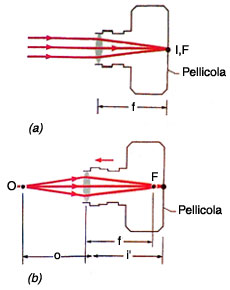
La macchina fotografica differisce sotto questo aspetto dall'occhio umano: nella macchina f č fissa ed č i che viene regolata spostando l'obbiettivo (verso l'esterno della macchina, quando o diminuisce), nell'occhio la distanza dell'immagine i resta costante e viene regolata f deformando il cristallino.
(vedi figura1)
[nell'occhio umano, i raggi paralleli, entrando nell'occhio rilassato che fissa un oggetto posto all'infinito, formano un'immagine sulla retina, posta a distanza f dal cristallino.
Se l'oggetto viene spostato a una distanza finita o, per poter formare un'immagine sulla retina la distanza focale dell'occhio deve essere ridotta a f' (cosa che si realizza per azione dei muscoli cigliari che provocano la contrazione del cristallino) (vedi figura2)].
Osservazione: molto spesso la distanza focale viene identificata con la distanza principale, in realtŕ, perň, tale corrispondenza č esatta solo nel caso di un obiettivo ideale, ossia privo di difetti.
La stereoscopia č la percezione del rilievo di un oggetto in conseguenza della visione binoculare, dovuta alla fusione tra le due diverse immagini che di questo si formano nei due occhi.
L'uomo, infatti, gode di una visione stereoscopica naturale del mondo che lo circonda, e questa avviene grazie agli occhi che, essendo in coppia, consentono l'apprezzamento della tridimensionalitŕ dello spazio reale e la valutazione approssimativa delle distanze.
Innanzitutto dobbiamo esaminare l'apparato ottico, cioč l'occhio, il cui funzionamento viene spesso assimilato a quello di una macchina fotografica: esso, infatti, č una particolare camera oscura dotata di obiettivo (cristallino), di un diaframma (iride) e di una superficie sensibile (retina).
In realtŕ la sensibilitŕ della retina non č uniforme ed č massima in un particolare punto (fovea) che, grazie alla possibilitŕ di rotazione del bulbo oculare, viene continuamente spostato nelle zone piů interessanti dell'immagine proiettata. Il raggio proiettante passante per esso prende il nome di asse visuale.
Nello schema č illustrato il funzionamento del nostro sistema visivo naturale: i bulbi oculari sono visti in pianta.
- Osservando un qualunque oggetto con ambedue gli occhi si percepisce una sola immagine di tale oggetto: le due immagini, raccolte separatamente dall'occhio sinistro e dall'occhio destro, si "fondono" infatti nel cervello in una immagine unica.
- Un punto che si avvicinasse o allontanasse rispetto alla posizione originaria Q, provocherebbe, al fine di mantenere la collimazione, una variazione angolare della posizione di una delle due pupille. [Risulta di facile comprensione, quindi, come la visione monoculare o monoscopica non sia sufficiente a farci apprezzare la profonditŕ o terza dimensione.]
Gli assi visuali risulteranno paralleli fra loro o convergeranno, a seconda che si stia osservando un punto molto distante (cioč posto praticamente all'infinito), o un punto vicino.
Piů vicino č tale punto piů grande č la convergenza degli assi visuali. Se il punto osservato č molto vicino tale convergenza diviene molto grande; quando lo sforzo di accomodamento degli occhi diviene eccessivo (per es. oltre i 15cm), la fusione delle immagini risulta impossibile: dell'oggetto osservato si vedranno di conseguenza due immagini (diplopia).
L'angolo formato dai due assi visuali, avente per vertice il punto osservato č detto angolo parallattico o parallasse angolare.
La stereoscopia puň essere anche originata tramite una coppia di fotogrammi, scattati da due punti distinti, la cui simultanea osservazione consente la percezione tridimensionale dell'oggetto fotografato: in questo caso parliamo di visione stereo artificiale.
La visione stereo artificiale
Se nell'analisi di un qualsiasi oggetto poniamo davanti agli occhi, alla minima distanza di osservazione, una lastra di vetro trasparente, i raggi visuali descriveranno su di essa due immagini prospettiche identiche a quelle ottenibili con una macchina fotografica, dotata di due obiettivi, distanti reciprocamente quanto la nostra distanza interpupillare, aventi una distanza principale uguale alla distanza della lastra dai nostri occhi o, con piů precisione, alla distanza dei centri di rotazione dei due bulbi oculari dalla lastra stessa.
Sostituendo l'immagine diretta dell'oggetto con le due diapositive ottenute, sistemate opportunamente sulla nostra lastra di vetro e osservate separatamente ma contemporaneamente, il nostro cervello percepirŕ un'immagine tridimensionale. Essa sarŕ tanto piů fedele all'originale quanto piů fedele sarŕ la ricostruzione, in fase di osservazione, dei due fasci di rette costituiti da tutte le posizioni assunte dagli assi visuali nell'analisi dell'oggetto.
Il modello ottico tridimensionale
Se i due fasci di rette, determinati dagli assi visuali in fase di ripresa, non coincidono con quelli individuati nell'osservazione della coppia stereo di fotogrammi, l'immagine percepita dal cervello differirŕ dall'originale.
Spesso, perň, si fa ricorso ad una opportuna variazione delle condizioni di osservazione rispetto a quelle di ripresa.
La ricostruzione dell'immagine, comunemente chiamata modello ottico tridimensionale, viene deformata o semplicemente ridotta per rendere piů agevole l'analisi dimensionale.
[Per rendersene conto, basta fare riferimento alla formula che ci consente di calcolare le coordinate dell'oggetto, partendo da quelle di una coppia di sue immagini stereometriche].
- Per analizzare, per esempio, le deformazioni di una superficie piana possiamo semplicemente aumentare, in fase di osservazione, la distanza principale esasperando eventuali convessitŕ o concavitŕ presenti.
- Aumentando, invece, la base di ripresa rispetto a quella di osservazione potremo ridurre in scala il modello ottico o, viceversa, ingrandirlo a piacere.
Nel caso della semplice osservazione stereo, per esempio, la base di restituzione corrisponde
alla distanza interpupillare (il cui valore medio possiamo ritenere di 6,5 cm.)
ed il modello ottico risulterŕ minore, uguale o maggiore dell'originale se, rispettivamente, la base di ripresa sarŕ maggiore, uguale o minore della stessa distanza interpupillare.
Nel primo caso parliamo di effetto iper-stereo, perchč la percezione della profonditŕ viene aumentata rispetto alla normalitŕ, ma a fronte della riduzione in scala dell'oggetto osservato.
Nell'ultimo caso, invece, ossia se il modello risulta ingrandito rispetto all'originale, parliamo di effetto ipo-stereo che, com'č ovvio, č diametralmente opposto a quello precedente.
In definitiva, per conoscere numericamente il valore ottimale della base di ripresa č sufficiente tener presente che:
- la minima distanza di osservazione del modello non deve essere inferiore a 25 cm e perché ciň sia possibile il rapporto tra la base di ripresa ed il punto piů prossimo dell'oggetto fotografato non deve discostarsi, come valore numerico, dal rapporto tra la distanza interpupillare e tale distanza minima di osservazione;
- la massima distanza dei punti del modello non deve superare la distanza di 1 m (raggio di azione del braccio), per cui il rapporto tra la base di ripresa e la distanza del punto piů lontano dell'oggetto fotografato non deve discostarsi, sempre come valore numerico, dal rapporto tra la distanza interpupillare e la distanza massima di osservazione (portata del braccio).
Sostituendo i rispettivi valori numerici si puň affermare, con la dovuta approssimazione, che la base di ripresa deve essere compresa tra 1/5 della distanza del punto piů vicino, oggetto della ripresa, e 1/20 della distanza di quello piů lontano.
[I motivi che determinano tali preferenze sono da ricercarsi essenzialmente nel fatto che impegnando, con l'oggetto osservato, tutto il campo visivo ad una distanza non superiore al metro, il nostro cervello puň effettuare l'analisi dimensionale in una zona in cui non solo puň far ricorso alla triangolazione, effettuabile con gli assi visuali, ma i risultati delle misure ottenute sono maggiormente affidabili perché sottoposti continuamente ad operazioni di verifica.
Non dobbiamo dimenticare, infatti, che in tale zona non commettiamo errori nel portare le mani sugli oggetti che vogliamo prendere, proprio per la precisione con cui ne č stata rilevata la posizione e che tale elevato grado di precisione č stato raggiunto grazie ad un continuo alternarsi (sin dall'infanzia) delle operazioni di rilievo (individuazione dell'oggetto) con quelle di verifica (presa dell'oggetto).
Nel caso in cui il campo visivo viene impegnato totalmente a grande distanza, invece, le posizioni di rilievo da parte del cervello vengono effettuate ancora con triangolazioni, ma con una base troppo piccola.
In sostanza la differenza tra le due prospettive ottenute dai due punti di vista diventa impercettibile, fino ad annullare l'effetto stereo.]
4- L'ORIENTAMENTO
Per ottenere una fotografia stereo č sufficiente effettuare due normali riprese fotografiche dello stesso oggetto da due punti di vista distinti: in realtŕ con ciň otteniamo semplicemente l'effetto stereo, ma, se vogliamo che l'immagine dell'oggetto fotografato risulti in scala, č necessario individuare la posizione spaziale delle foto al momento dello scatto.
Questa operazione consiste nel trovare:
- l'orientamento interno, ossia la posizione del punto di presa rispetto al fotogramma;
- l'orientamento esterno, ossia la posizione del punto di presa rispetto al sistema di riferimento oggetto.
Per poter determinare l'orientamento interno č necessario disporre di un certificato che descriva le caratteristiche geometriche della fotocamera. In esso deve essere riportata la lunghezza focale cioč la distanza tra il centro di proiezione, ed il piano su cui si trova la pellicola.
La proiezione sul piano della pellicola del centro di proiezione prende il nome di punto principale del fotogramma e per determinarlo č necessario che sul fotogramma vengano impressionate la posizione di alcuni punti solidali con la fotocamera, di cui il certificato riporterŕ le coordinate in un sistema di riferimento che ha origine nel punto principale.
Per quanto riguarda l'orientamento esterno, invece, ai fini della ricostruzione del modello ottico ciň che conta non č tanto la disposizione delle camere al momento della ripresa, quanto la perfetta conoscenza di detta disposizione.
In pratica, tuttavia, si sceglie solo fra le tre disposizioni seguenti:
Assi convergenti
Per rendere ottimale l'analisi del modello ottico, lo si riduce in dimensioni tali da poterlo osservare ad una distanza superiore a 25 cm ed inferiore ad 1m:
in queste condizioni i raggi visuali descrivono due fasci di rette, i cui assi sono convergenti e, a rigor di logica, gli assi ottici delle camere dovrebbero formare lo stesso angolo. Si tratta in realtŕ di un ragionamento puramente teorico, poiché la camera metrica non presenta l'automatismo di cui invece gode l'occhio.
Per esempio, quando osserviamo direttamente un oggetto della stessa grandezza del modello ottico e posto alla sua stessa distanza, l'occhio riesce a selezionare solo ciň che interessa, grazie al tipo di messa a fuoco ed alla particolare superficie sensibile di cui č dotato. La camera metrica, al contrario, riproduce nitidamente anche ciň che č posto dietro l'oggetto, per cui, nel caso di riprese con assi convergenti, lo sfondo (che appare dietro l'oggetto) puň essere differente sui due fotogrammi e disturbare la visione stereo.
Esistono, poi, numerosi altri inconvenienti (tra cui la particolare disposizione dei fotogrammi in fase di restituzione) che sconsigliano l'applicazione pratica di tale orientamento.
Assi ortogonali alla base.
E' il tipo di orientamento (piů comunemente detto caso normale) che noi prenderemo in considerazione: in esso le superfici sensibili sono complanari e gli assi ottici degli obiettivi sono perpendicolari ad esse (quindi paralleli tra loro).
Tra i vantaggi che esso presenta vi č:
- la semplicitŕ delle formule matematiche con cui č possibile ricavare le coordinate spaziali di tutti i punti visibili dell'oggetto fotografato;
- la disposizione dei fotogrammi in fase di restituzione (sia ottica che grafico-numerica).
Rispetto alle riprese con assi convergenti, il caso normale presenta l'inconveniente di non utilizzare per intero la superficie dei fotogrammi (a causa del ricoprimento longitudinale parziale che diminuisce con l'aumentare della base) ma si tratta di un problema di scarsa importanza che, comunque, puň essere risolto facendo ricorso al decentramento laterale.
Assi obliqui e paralleli.
Se la distanza di ripresa č molto piccola rispetto alle dimensioni dell'oggetto fotografato ed alla focale della camera impiegata (o quando la presenza di ostacoli impedisce di collocare l'equipaggiamento di ripresa di fronte all'oggetto da fotografare), č possibile inclinare gli assi ottici delle camere rispetto alla base, conservando il loro parallelismo. In questo caso il valore della base non sarŕ dato dalla distanza tra i due punti stazione, ma dalla distanza fra gli assi stessi.
5- LA STEREOGRAMMETRIA
Come č stato detto la fotogrammetria č la tecnica che consente di rilevare le misure di un oggetto utilizzando le sue immagini fotografiche: in particolare parliamo di stereogrammetria (o stereofotogrammetria) se ciň avviene mediante immagini stereometriche.
Č opportuno,infatti, distinguere i due seguenti casi:
1) l'immagine stereo deve essere semplicemente osservata;
2) l'immagine stereo deve riprodurre con elevata precisione, in una determinata scala, l'oggetto fotografato, del quale vogliamo ottenere delle misure.
Nel primo caso, parliamo di immagini stereoscopiche, nel secondo di immagini stereometriche.
A livello teorico, la tecnica fotogrammetrica comporta la risoluzione di un problema : quello di relazionare lo spazio-oggetto tridimensionale con lo spazio-immagine bidimensionale, in maniera univoca; questo ci consente di relazionare un punto qualsiasi dello spazio-immagine al corrispondente punto dello spazio-oggetto.
Distinguiamo, infatti tre tipi di grandezze:
- le coordinate 3D(X,Y,Z) dell'oggetto;
- le coordinate 2D(x1,z1); (x2,z2) delle immagini;
- i valori dei parametri di orientamento;
In particolare:
i parametri di orientamento sono quelli che governano i rapporti tra lo spazio-oggetto 3D e quello immagine 2D: essi esprimono le caratteristiche della macchina fotografica e il suo posizionamento tra i due tipi di spazi, e ci consentono di trasformare gli spazi-immagine 2D nello spazio-oggetto 3D (questa operazione viene detta fase di restituzione).
È ovvio che l'orientamento scelto in fase di presa influenzerŕ la semplicitŕ delle formule matematiche con cui č possibile ricavare, in fase di restituzione, le coordinate spaziali dei punti dell'oggetto fotografato.
La fase di restituzione nel caso normale
Supponiamo allora di disporre di due fotogrammi stereometrici, ottenuti nel rispetto del caso normale: vogliamo calcolare le coordinate P(X,Y,Z) di un punto qualsiasi dell'oggetto in essi ripreso, una volta note le coppie di coordinate P1(x1,z2), P2(x2,z2) dello stesso punto rilevate sui fotogrammi stereometrici.
Sono noti:
i parametri di orientamento interno di ciascuna immagine:
- la posizione del punto principale: rispettivamente O' e O'';
- c = distanza principale;
i parametri di orientamento esterno:
- le due fotocamere sono poste in O1 e O2 (rispettivamente punto di presa sinistro e destro), a distanza pari a B (=base di ripresa)
- il sistema di riferimento dell'oggetto ha l'origine nella camera di sinistra (ossia coincide con O1=punto di presa sinistro), l'asse Y č diretto secondo l'asse ottico dell'obiettivo di sinistra, l'asse X secondo la base e l'asse Z č ortogonale al piano XY;
- l'origine del sistema di riferimento di ciascun fotogramma si trova nel punto principale: (rispettivamente O' e O''); gli assi delle ascisse (x1 e x2) e delle ordinate (z1 e z2), essendo l'immagine capovolta, sono diretti rispettivamente verso sinistra e verso il basso.
Sfruttando opportunamente la similitudine dei triangoli determinati dalle rette proiettanti il punto P, č facile provare che esiste una corrispondenza biunivoca tra le coordinate di P(X,Y,Z) e di quelle delle sue immagini P1(x1,z1) e P2(x2,z2), proiettate sui fotogrammi sinistro e destro rispettivamente.
1) Consideriamo, ad esempio, il piano XY:
- possiamo impostare una semplice proporzione fra i due triangoli simili determinati dalla retta proiettante sinistra:
- in modo del tutto analogo, per i due triangoli simili determinati dalla retta proiettante destra:
Risolvendo il sistema di due equazioni nelle incognite X e Y, si ottiene:
2) Ripetendo lo stesso ragionamento per il piano YZ, possiamo calcolare la coordinata Z ed ottenere, infine:
Osserviamo che le coordinate di P(X,Y,Z) sono funzioni lineari della base di ripresa B, mentre la sola coordinata Y č funzione lineare della distanza principale c.
In sostanza se si mantengono inalterate le altre variabili, modello di restituzione ha la stessa scala di rappresentazione della base; variando la distanza principale, invece, la sola coordinata Y varierŕ proporzionalmente.
6- LA PRECISIONE
La precisione delle coordinate rilevate dipende dai seguenti fattori:
individuazione dei punti corrispondenti, se si tratta di coppie stereometriche di fotogrammi.
Il primo fattore merita un discorso a parte; per quanto concerne gli altri due, invece, c'č solo da aggiungere che l'individuazione č ovviamente tanto più agevole e precisa, quanto più aumentano le dimensioni dei fotogrammi.
Il problema č che l'aumento delle dimensioni dei fotogrammi avviene a scapito della velocitŕ di caricamento degli stessi.
 1- LA FOTOGRAFIA COME PROIEZIONE CENTRALE
1- LA FOTOGRAFIA COME PROIEZIONE CENTRALE
 Ricordiamo che una proiezione centrale č ottenuta proiettando i punti dell'oggetto su un piano (= piano o quadro di proiezione) da un punto esterno ad esso (= centro di proiezione o di vista).
Ricordiamo che una proiezione centrale č ottenuta proiettando i punti dell'oggetto su un piano (= piano o quadro di proiezione) da un punto esterno ad esso (= centro di proiezione o di vista).
 I raggi luminosi provenienti dallo spazio esterno (dovendo attraversare un mezzo di densitŕ
differente dall'aria), vengono deviati, e danno luogo a due fasci di raggi (il primo entrante, l'altro uscente dall'obbiettivo), i cui centri sono proprio i punti nodali.
I raggi luminosi provenienti dallo spazio esterno (dovendo attraversare un mezzo di densitŕ
differente dall'aria), vengono deviati, e danno luogo a due fasci di raggi (il primo entrante, l'altro uscente dall'obbiettivo), i cui centri sono proprio i punti nodali.
 2- I PARAMETRI LEGATI ALLA GEOMETRIA DELLA MACCHINA FOTOGRAFICA
2- I PARAMETRI LEGATI ALLA GEOMETRIA DELLA MACCHINA FOTOGRAFICA
 Per utilizzare una fotografia ai fini fotogrammetrici, cioč per ricavarne misure dell'oggetto fotografato, č indispensabile conoscere perfettamente gli elementi che individuano tali caratteristiche od avere la possibilitŕ di determinarli in modo appropriato.
Per utilizzare una fotografia ai fini fotogrammetrici, cioč per ricavarne misure dell'oggetto fotografato, č indispensabile conoscere perfettamente gli elementi che individuano tali caratteristiche od avere la possibilitŕ di determinarli in modo appropriato.
 In pratica, riducendo l'obiettivo ad un punto e prendendo come riferimento lo schema, possiamo dire che:
In pratica, riducendo l'obiettivo ad un punto e prendendo come riferimento lo schema, possiamo dire che:
 Nello schema č illustrato il funzionamento del nostro sistema visivo naturale: i bulbi oculari sono visti in pianta.
Nello schema č illustrato il funzionamento del nostro sistema visivo naturale: i bulbi oculari sono visti in pianta.
 - Per analizzare, per esempio, le deformazioni di una superficie piana possiamo semplicemente aumentare, in fase di osservazione, la distanza principale esasperando eventuali convessitŕ o concavitŕ presenti.
- Per analizzare, per esempio, le deformazioni di una superficie piana possiamo semplicemente aumentare, in fase di osservazione, la distanza principale esasperando eventuali convessitŕ o concavitŕ presenti.
 A livello teorico, la tecnica fotogrammetrica comporta la risoluzione di un problema : quello di relazionare lo spazio-oggetto tridimensionale con lo spazio-immagine bidimensionale, in maniera univoca; questo ci consente di relazionare un punto qualsiasi dello spazio-immagine al corrispondente punto dello spazio-oggetto.
A livello teorico, la tecnica fotogrammetrica comporta la risoluzione di un problema : quello di relazionare lo spazio-oggetto tridimensionale con lo spazio-immagine bidimensionale, in maniera univoca; questo ci consente di relazionare un punto qualsiasi dello spazio-immagine al corrispondente punto dello spazio-oggetto.
 Sfruttando opportunamente la similitudine dei triangoli determinati dalle rette proiettanti il punto P, č facile provare che esiste una corrispondenza biunivoca tra le coordinate di P(X,Y,Z) e di quelle delle sue immagini P1(x1,z1) e P2(x2,z2), proiettate sui fotogrammi sinistro e destro rispettivamente.
Sfruttando opportunamente la similitudine dei triangoli determinati dalle rette proiettanti il punto P, č facile provare che esiste una corrispondenza biunivoca tra le coordinate di P(X,Y,Z) e di quelle delle sue immagini P1(x1,z1) e P2(x2,z2), proiettate sui fotogrammi sinistro e destro rispettivamente.